|
RK3568开发板烧录以下镜像:
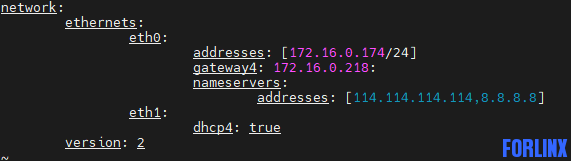
1. 烧录完成后使用root用户登录。 PS:forlinx用户未作测试,可依照以下方法自行测试。 2. 操作需要开发板能够连接外网,先修改ip并连接网线。
测试能够ping通外网后继续以下操作。 3. 执行
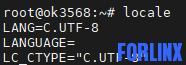
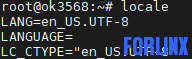
4. 确保系统支持UTF-8
5. 安装以下软件 添加ros2的源和一些相关软件
有选项选择y 6. 添加公钥信息
7. 添加源
8. 更新源
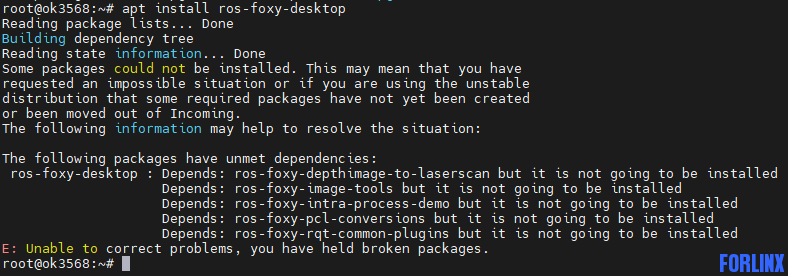
9. 安装ROS2桌面版本
会提示有依赖包无法安装
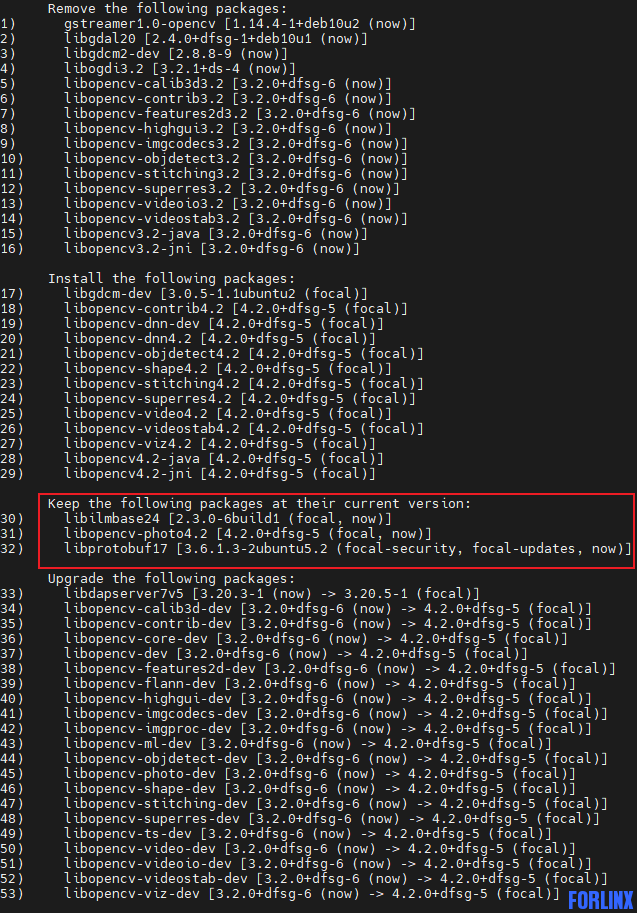
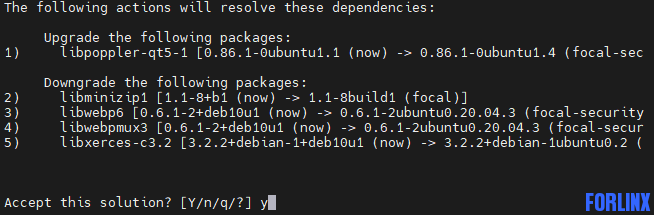
使用aptitude处理依赖包
命令之后会出现选项:
看Keep项中的依赖后没有出现 [ Not installed ]选择y
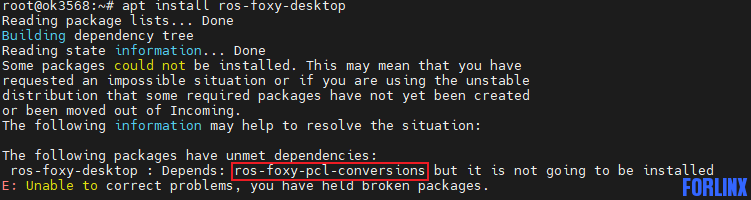
接收这个办法,后续有选项选择y,等待安装完成。 10. 重新输入安装命令
看是否还有依赖包无法安装,如果还有依赖无法安装,依照上述方法处理依赖。 比如:
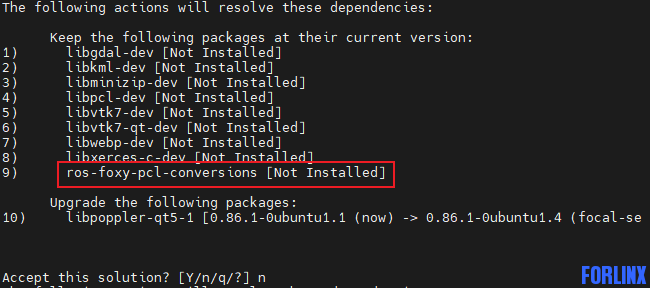
看选项中Keep中的依赖是否有 ros-foxy-pcl-conversions [Not Installed]
有的话选择n,看后续选项,直到没有该选项选择y。
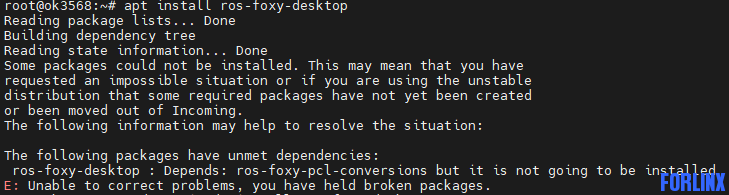
后续有选项选择y,等待安装完成。 11. 重新输入安装命令
没有出现报错则有选项就选择y,直到安装完成。 如果出现以下错误:
改用以下命令安装
还是按照之前步骤进行选择,直到Keep下的依赖中没有 ros-foxy- desktop [Not Installed] 之后选择y,直到安装完成。 12. 安装完成后设置环境变量
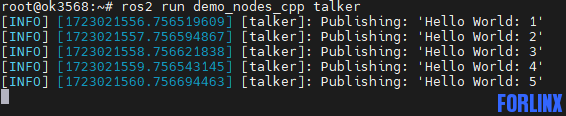
13. 运行例程看是否安装完成
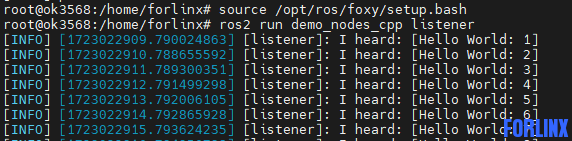
打开另一个终端使用远程登陆开发板 运行环境变量后输入以下命令
会监听talker发来的信息。 |
 |小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )
|小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )
GMT+8, 2026-7-7 11:19
Powered by Discuz! X3.4
© 2001-2013 Comsenz Inc.