- 积分
- 306
贡献1474
飞刀579 FD
注册时间2015-12-21
在线时间51 小时
扫一扫,手机访问本帖 
|
飞凌嵌入式基于全志系列处理器设计的OKA40i-C开发板、OKT3-C开发板因其接口丰富、低功耗、系统集成度高等特点,深受广大用户赞誉。
9 S( R% r; h" u ; F9 p" `" V( v ; F9 p" `" V( v
小编通过对飞凌技术服务部“A40i/T3客户群问题解决库”进行检索,梳理了部分共性问题及解决思路。本文主要对OKA40i-C开发板/OKT3-C开发板CAN功能使用过程中多次遇到的问题进行讲解。
; I* v: n; v# R4 M
! w6 C$ d! X7 ^- [- ?3 Q 由于全志 A40i/T3 CPU 中未包含CAN控制器,而在实际使用过程中,如果用到CAN功能,通常会采用SPI转CAN的方式。在此之前飞凌已经提供了OKA40i-C开发板/OKT3-C开发板对CAN的支持方法(参考链接: 研发干货丨A40i/T3对CAN的支持 点击查询),本文就不在做赘述,仅针对用户在实际操作过程中遇到的问题提供解决思路,请跟着小编来一起看看吧。
. n7 ]# X5 p: U) h2 M! p! ^8 a. |$ M) a& s9 D
一、中断引脚怎么如何选择? 2 p, m/ ? G; E) [6 ?& @
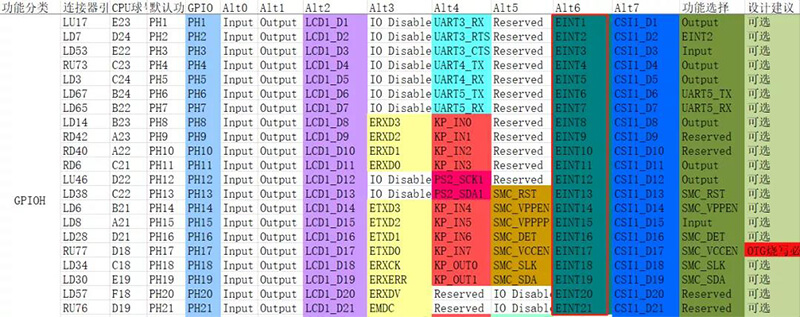
在选择复用引脚时,需要给SPI转CAN模块选择一个中断引脚,而FETA40i-C/FETT3-C核心板并非每个引脚都具有中断功能,需要在《引脚复用对照表》中进行筛选,选择带有中断功能的GPIO。 ' f# r* e! S# u1 U# T/ D# E
首先需要确定哪些引脚具有中断功能,表格中引脚可复用功能中具有EINT*的引脚是具有中断功能的。我们可以从这些引脚中选择一个作为SPI转CAN模块的中断引脚,选择时注意这些引脚原本是什么功能,选择一个不需要的功能引脚作为SPI转CAN模块的中断引脚,
' Q; T( x# z3 B* @1 y% W( N5 e% I7 G 比如下图是我们的方案中选用的PH6这个引脚。
9 Y$ P( V" s7 G5 F6 b# `0 b. Z2 k: G6 x) `6 k
/ M( H5 ?9 x0 r. h* F. k- h$ K 2 s- b) m3 d( H# q. {/ N4 Z; l3 N1 r 2 s- b) m3 d( H# q. {/ N4 Z; l3 N1 r
& d# b( e9 g$ O0 y& D8 Z ?) a6 T 二、 哪些引脚可以用作SPI功能? 6 g5 w8 C0 R! @7 b. }
1)开发板默认SPI功能的引脚在OKA40i-C开发板/OKT3-C开发板上,默认引出了SPI0和SPI2两组引脚,可以选择这两组引脚。需要注意的是这两组信号默认为1.8V,需要硬件上做电平转换为3.3V才能用于SPI转CAN的设置。
9 ]( w4 D. v/ z0 @9 |! Z" f
4 O6 Z3 o/ y) h
: O; g/ i+ y1 l' i( Z2 y 这两组引脚在fex文件里已经做了配置,只需要按照方法做其它修改即可。
* Y* n2 d# G! B+ Q3 \/ \* K9 p& ^" J3 P! ~+ b% k1 t' i
2)将其它功能引脚复用为SPI功能在飞凌嵌入式《A40i/T3对CAN的支持》(点击查询)一文中详细讲解了如何将开发板上UART2功能相关的引脚复用为了SPI。 1 v2 ~' D8 B4 [6 B
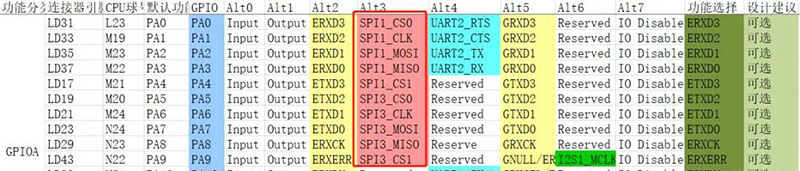
假如不想使用UART2引脚复用又不知道如何选择的话,飞凌嵌入式全志A40、全志T3 用户资料中提供了《引脚复用对照表》,从中查询哪些引脚可以复用为SPI功能,然后根据实际需求去选择要复用的引脚。 ; g3 o- g2 I5 `
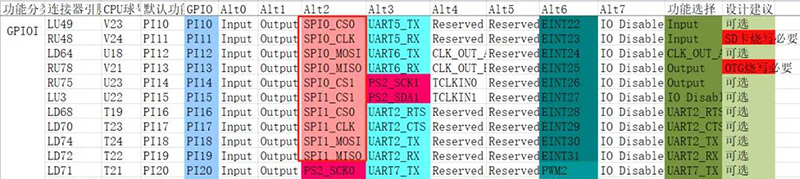
查找时请先检索需要使用的功能“关键词”,比如需要SPI功能,请检索“SPI”,找到可复用成SPI功能的引脚,当前表格中默认功能列是引脚名称,功能选择列是默认配置的功能,
, W' V" P1 a6 ?# J% ~/ { 例如PI16、PI17、PI18、PI19四个引脚,可以复用成SPI1,默认是UART2功能。 2 f) Z- l& ~* D7 n: f$ L
3 ?) [$ k: a2 X8 o$ o( E
 & z* O9 v+ l* _# M & z* O9 v+ l* _# M
 6 r# |- o9 b8 ^# A 6 r# |- o9 b8 ^# A
4 p) v" B, a$ N8 @' u
! ]3 |, B# w) Q 三、iproute配置繁琐
/ f0 e: j7 [; n: liproute需要在Buildroot里配置,需要编译Buildroot重新生成文件系统,过程太麻烦? }0 y& Q9 }/ z0 j: v1 \/ L3 p
iproute是一个网络管理工具,在设置波特率时有用到。如果使用飞凌嵌入式2020.08.31及之后提供的全志A40i及全志T3开发板资料,Buildroot已经配置完成,可以忽略该步操作,不用重新编译Buildroot,只需按照方法做好其它配置就可以了!这样可以减少一些不必要的编译问题,更快速的完成相关配置! ) H* Z& B' ~7 K
/ ~" l# w7 n$ h8 r7 R3 y3 ]
当然,也可以单独下载源码编译, + c# a) p! Y i+ _! Y7 z
下载链接:https://mirrors.edge.kernel.org/pub/linux/utils/net/iproute2/ 4 ?! k% J M3 } J' F' Y! N6 G
例: 1 @* c6 _" t4 O P8 L" j; L
下载iproute2-4.10.0.tar.gz % ^* U( M S/ F g. |5 Z( s2 c
解压源码,修改Makefile文件中的交叉编译器
0 _3 o9 W7 C, U# s2 w 指定CC=arm-linux-gnueabihf-gcc-5.3.1
' E) h" U( Q# G @- J6 q, h执行make编译,在ip文件夹中得到程序ip。
6 p' F: y; z8 V' f5 V5 C& |: i5 c" C8 `# d, c/ S
四、数据丢帧问题A 0 N9 ]& b E2 ]# \
通过SPI转CAN实现的CAN功能,相对于原生CAN的性能有一定的不足,在500K波特率下外部设备单次发送多帧数据,接收数据时可能出现丢帧现象,频繁收发数据可能出现丢帧现象,为解决这一问题,需要取消CPUIdle Driver for Sunxiprocessors选项,在飞凌嵌入式提供的最新全志A40i及T3的资料源码中已经做了重新配置!
& `0 G9 q0 R3 A* C% W' } 如果您使用的不是最新资料,
# \. l9 f, p2 ?; V5 `$ u 可以在源码中linux-3.10目录下执行makemenuconfig ARCH=arm 4 X( T) f- s$ `; S8 l$ I) B3 E
将[] CPU Idle Driver for Sunxi processors的编译去掉
! e" }( a, J" ~, H7 w9 W1 ECPU Power Management --->
. n: y- o' P2 @; q4 i+ C, j [ ] CPU Idle Driver for Sunxi processors
& y" c% \: d/ E) L& B
8 U+ d1 L! C+ y" \1 W* [- v- N; y2 o. E7 H) ^0 H% W+ M$ S" _
# ?- J5 e; f$ i g$ w! i& u/ P
本次我们的解答问题梳理先到这里了,通过以上解答,希望能对大家的开发过程提供了帮助,减少问题,提高开发效率!
6 s8 I+ u: k! Q ^' k m9 q t, i' n" r# i9 e
7 L, r& j0 ~0 y6 W4 g' [9 J) A% _7 i( o1 Y6 e( Z h
相关产品: + i7 J$ p# y) ~+ ^
7 Z: B$ q2 c! i! B' _* }3 b' r, }( h3 P+ L2 N
1 H6 t# o% v1 R; Y! h1 s |
|
 |小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )
|小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )

 发表于 2021-12-10 17:13:01
发表于 2021-12-10 17:13:01
 FETA40i-C核心板" }" U3 J, {4 ?, T8 i( ^( w, T
FETA40i-C核心板" }" U3 J, {4 ?, T8 i( ^( w, T FETT3-C核心板
FETT3-C核心板 千斤顶
千斤顶