本帖最后由 飞凌-marketing 于 2022-1-27 10:42 编辑 + ]! J) ~( [, s% a" w: c4 f* G5 S
, h7 x# m) |9 v0 c. J) q4 G

作者|牛志超 来源 | 飞凌嵌入式 题图|飞凌嵌入式 FETT507-C核心板 原文链接:https://www.forlinx.com/article_view_815.html* [$ b B9 o1 O2 @% @
# i9 P |9 V$ V) `
全志T507处理器本身不支持CAN功能,那有什么方法可以实现CAN功能呢? 我们已知FETT507-C核心板是支持SPI接口的,但底板没有引出该接口,所以小编打算通过引脚复用方式,复用出SPI接口并做成SPI转CAN,来实现CAN功能。 本文所采用的方法是通过添加MCP2515驱动及配置,实现SPI转CAN功能。
9 A) a$ o" X; V0 ?( w4 w一、选择引脚
6 N0 z" g5 F* }1 y+ U首先确认要使用的引脚,由于飞凌嵌入T507开发板默认没有配置SPI,因此既要选用于SPI功能的引脚,也要选择用于can模块的中断引脚。 SPI需要CS0、CLK、MOSI、MISO四个引脚,can模块需要一个中断引脚。中断引脚可以随便使用一个具有中断功能的引脚。打开硬件资料中的飞凌嵌入式T507核心板引脚复用对照表,先确认哪些引脚可以用做SPI,我们搜索SPI可以找到两组引脚 ; y1 l' O/ C$ u- t, k
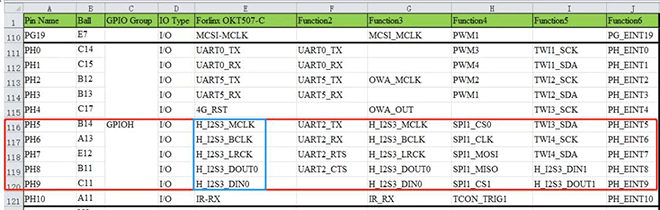
因为PC3、PC4和启动相关这里不考虑使用SPI0,我们用SPI1,SPI1使用的引脚默认为音频接口使用的引脚,音频将不能使用。所以我们的中断引脚也从音频使用的引脚中选择,我们选择PH9(用户可根据实际情况选择具有中断功能的引脚)。 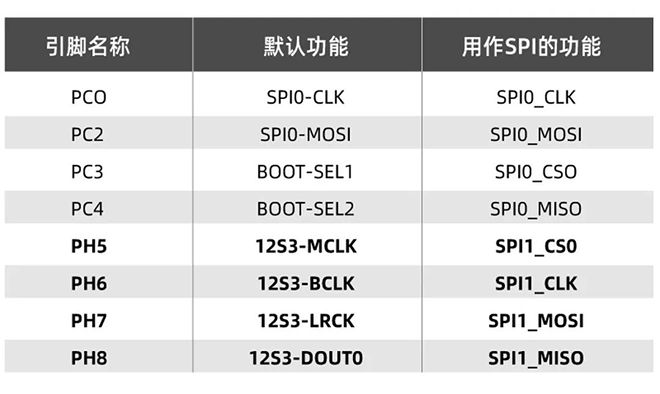
我们需要的引脚已经确定了(加粗的5个引脚),现在进行软件修改 ! R5 J) a# ]* J
二、相关设备& C0 ?% y$ {6 \: D1 B& s% {, u
首先查看设备树,本次使用到的设备树如下: kernel/linux-4.9/arch/arm64/boot/dts/sunxi/OKT507-C-Common.dtsi kernel/linux-4.9/arch/arm64/boot/dts/sunxi/sun50iw9p1.dtsi kernel/linux-4.9/arch/arm64/boot/dts/sunxi/sun50iw9p1-pinctrl.dtsi kernel/linux-4.9/arch/arm64/boot/dts/sunxi/sun50iw9p1-clk.dtsi ! E2 o, L" B2 H7 j# ^
三、去掉所选引脚原有配置
% n S9 u. J9 M从核心板引脚功能复用表格可以看到,选用的引脚原本配置的功能: 
2 z1 b# U5 w3 k+ ?5 y
sun50iw9p1-pinctrl.dtsi搜索PH5引脚,可以看到ahub_daudio3_pins_a和ahub_daudio3_pins_b是用于音频,在设备树路径使用grep"ahub_daudio3_pins_a" ./ -nr指令可以查到,在sun50iw9p1.dtsi里有调用: " T$ f8 s: e, r0 B
( ^& v1 B2 }; K" i( x打开sun50iw9p1.dtsi,可以看到在ahub_daudio3节点有调用,将status设置为disabled(默认即为disablded状态)
0 A9 s( h; W) }) f) h* u
0 Q: J: l Y4 j
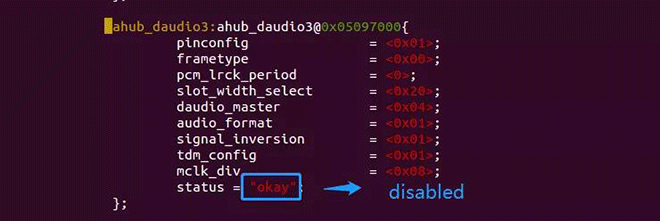
这个设备树里设置的disabled,继续查找该设备树的上级设备树:OKT507-C-Common.dtsi。OKT507-C-Common.dtsi有做开启设置,需要将ahub_daudio3关掉,status= "disabled"。PH5、PH6、PH7、PH8、PH9的占用都解除了。
+ d/ ^7 l( B, Q. s8 v6 ~$ I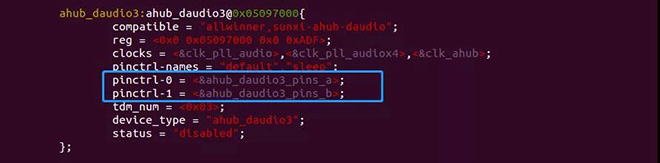
7 M, n- ~$ Q; k6 _& [% P: |四、配置SPI1
6 |# E3 ]* j7 C8 S4.1使能SPI1配置4 ]! r% `& ?9 w6 Y: W
搜索SPI1相关内容,在sun50iw9p1.dtsi中可以看到 $ u5 ?) l/ x4 a
" a7 {& ^+ M: j& ?7 q2 k
这个是对SPI1的注册,将status改为okay,这里对相关引脚和时钟做了配置。
" S2 t" c; w: V5 O! E/ c9 {' ~4.2 SPI1的时钟及引脚配置
5 V4 ?5 \$ u! ^4 `. S- {$ _时钟:我们通过查看sun50iw9p1-clk.dtsi可以看到clk_pll_periph0和clk_spi1的内容,我们使用默认配置即可。这里不再贴图,可自行查看 引脚:我们查看sun50iw9p1-pinctrl.dtsi可以看到spi1_pins_a、spi1_pins_b和spi1_pins_c的内容,使用引脚为PH5、PH6、PH7、PH8。
- ?0 e$ H# j' q+ h, L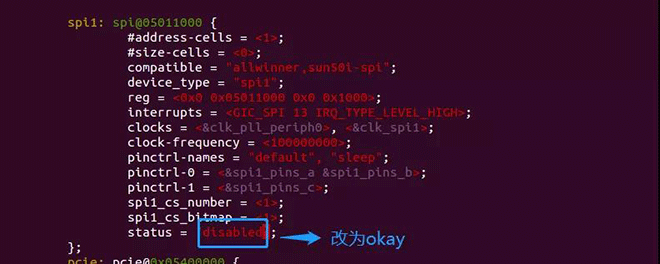
五、配置SPI转CAN设备: r. v- g( x0 q+ F1 D0 P
5.1 添加设备
% l) g2 `5 f" p在OKT507-C-Common.dtsi中SPI0节点后添加SPI转CAN相关节点,添加内容如下:
7 F' I0 t7 r3 w' ~* lspi1: spi@05011000 { pinctrl-0 = <&spi1_pins_a &spi1_pins_b>; pinctrl-1 = <&spi1_pins_c>; spi_slave_mode = <0>; status = "okay"; can0: can@0 { compatible = "microchip,mcp2515"; pinctrl-names = "default"; pinctrl-0 = <&mcp2515_int>; reg = <0>; spi-max-frequency = <1000000>; clocks = <&clk_osc8m>; interrupt-parent = <&pio>; interrupts = <PH 9 IRQ_TYPE_LEVEL_LOW>; status = "okay"; };};" F5 f* o5 `% v5 y& u3 r
其中中断引脚配置,请根据实际配置的引脚进行修改。
( P) {/ L% w: p4 _5.2 时钟配置
9 J5 N% x% h# ^# O/ J1 a6 J我们在注册can的时候用到了时钟和中断引脚,前边关掉音频时PH9已经可以使用了,但是我们用到的8M时钟clk_osc8m还没有注册。 打开sun50iw9p1-clk.dtsi,添加clk_osc8m到clk_osc48m下边 , ]" ?5 N: D% r
clk_osc8m: osc8m { #clock-cells = <0>; compatible = "allwinner,fixed-clock"; clock-frequency = <8000000>; clock-output-names = "osc8m";};7 l' f) }/ h/ W( F& I
" T" w+ @: ^6 O f3 r( r2 Q# m$ J
如果是选择24M晶振,也可注册clk_osc24m,clock-frequency改为24000000
2 G9 w2 w) b/ t5.3 中断引脚配置# C# `- c J5 r% I
在OKT507-C-Common.dtsi中添加,在该设备树中搜索:pio:pinctrl@0300b000,将以下配置添加到该节点里边。
& k2 R8 o( m/ Hmcp2515_int: can0@0 { allwinner,pins = "PH9"; allwinner,pname = "mcp2515_int"; allwinner,function = "irq"; allwinner,muxsel = <6>; allwinner,drive = <1>; allwinner,pull = <0>;};4 F) Y8 d& e2 l
( ?+ J# g8 c5 E/ S/ r5.4 mcp2515驱动配置2 |# I) Y3 W: k# F
到此,我们在设备树中的修改已经完成接下来,我们添加mcp2515驱动配置,驱动位于kernel/linux-4.9/drivers/net/can/spi/,可以看到mcp251x.c,我们可以打开该目录里的Makefile文件,Makefile文件中已经配置了CONFIG_CAN_MCP251X 进入kernel/linux-4.9目录中,执行如下命令:
+ l2 I5 ]3 _- ]4 m. M+ M# Lmake sun50iw9p1smp_longan_defconfigmake menuconfig ARCH=arm64
: s5 [/ ~. n* f+ i进入图形配置界面,我们添加mcp2515的编译,每一级目录选如下选项: Networking support ---> <*>CAN bus subsystem support ---> CAN Device Drivers ---> CAN SPI inte**ces ---> <*> Microchip MCP251x SPI CAN controllers前边括号里的内容通过空格键修改,“*”是编译进内核,“M”是编译成模块,空的是不编译。此处需要编译进内核 修改完成后按Esc键退出,最后选yes保存配置为.config。
1 J1 M8 q4 H1 i修改完成,按照手册编译源码,生成镜像
& K9 p# w4 c, [5 S注: 配置menuconfig后保存为.config,使用./build.sh kernel单步编译内核,会使用该.config 若使用./build.sh进行全编译,会重新把sun50iw9p1smp_longan_defconfig加载为.config,之前的配置将不生效。因此通过menuconfig修改完后,保存的.config要做好备份,在全编译前需要将文件,将其重命名为 sun50iw9p1smp_longan_defconfig,并替换kernel/linux-4.9/arch/arm64/configs下的同名文件 7 \7 M2 U W/ X% [0 m2 `; H9 j- g
六、CAN测试
, d. }5 _6 t$ i: w) W7 h将编译好的镜像烧录到核心板中,并将资料里的相关测试工具:ip、cansend和candump拷贝到T507开发板根目录。 硬件接好SPI转CAN模块,与PC机接好,使用USB转CAN插在电脑上 启动T507开发板执行以下程序进行测试: " \& J; n7 a' H: e; M; p# w( K
ifconfig can0 down/ip link set can0 up type can bitrate 125000 triple-sampling onifconfig can0 up/cansend can0 123#12345678 //发送数据/candump can0 //接收数据七、硬件修改方法
$ E* d Q C" O/ v( a$ x- \+ R) ^在飞凌嵌入式T507开发板上移植使用SPI转CAN模块 首先要在T507开发板上去掉C132/U18这两个器件,之后通过飞线的方式将SPI转CAN的模块连接至T507开发板,连接方式如下:
& d8 w& I& X# v1 J
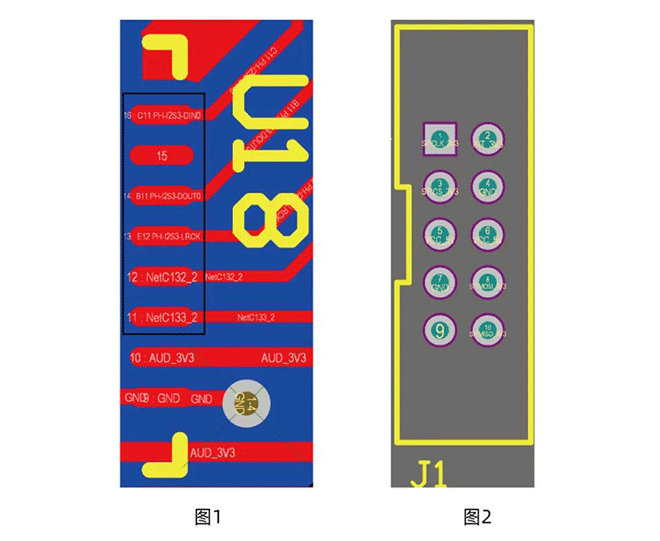
0 g- H6 Z+ V; ]& v) S5 ?4 J4 Y4 {2 W0 J p2 f+ U
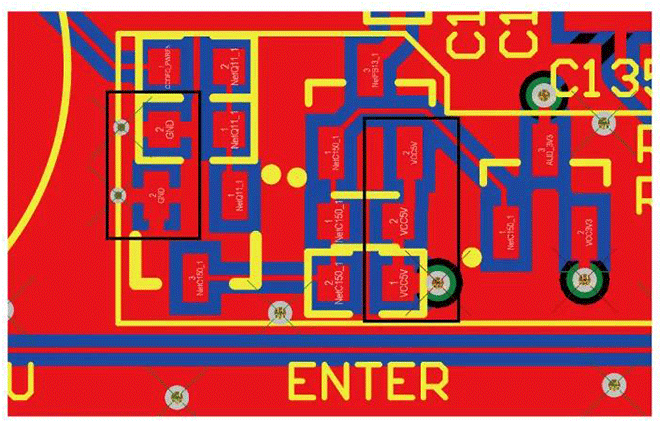
SPI转CAN的5V主供电可以通过音频芯片正下方的R194和R199上获得,位置如下图: 6 j# u0 m; A! F
" X2 x& E) {# j% E( J( U! [9 ZEND 5 S6 h4 W& @- V: v3 u
|  |小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )
|小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )

 发表于 2022-1-27 10:39:27
发表于 2022-1-27 10:39:27
 千斤顶
千斤顶