- 积分
- 121
贡献404
飞刀51 FD
注册时间2019-7-4
在线时间5 小时
扫一扫,手机访问本帖 
|
前几章我们介绍的都是 IO 口输出的使用,这一章我们通过按键控制实验来介绍下 IO 口作为输入的使用。本章所要实现的功能是:通过开发板上的 4 个按键控制 LED。
按键介绍
按键是一种电子开关, 使用时轻轻按开关按钮就可使开关接通, 当松开手时,开关断开。我使用的按键及内部简易图通常如下图所示。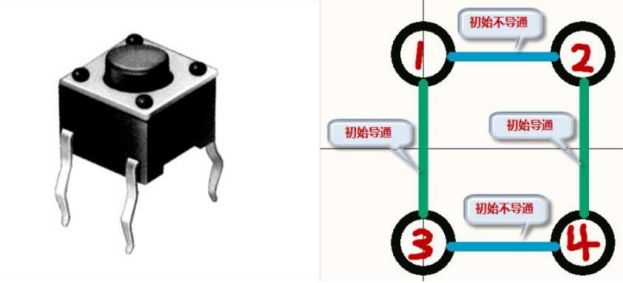
按键管脚两端距离长的表示默认是导通状态,距离短的默认是断开状态,如果按键按下,初始导通状态变为断开,初始断开状态变为导通。通常的按键所用开关为机械弹性开关,当机械触点断开 、闭合时,电压信号如下图所示。
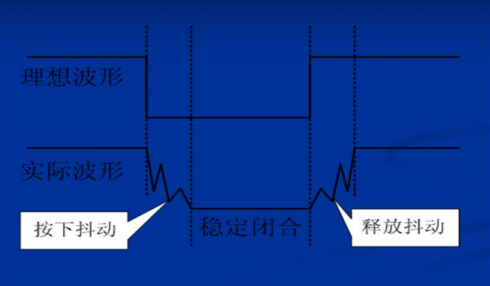
由于机械点的弹性作用,按键开关在闭合时不会马上稳定的接通,在断开时也不会一下子断开,因而在闭合和断开的瞬间均伴随着一连串的抖动。抖动时间的长短由按键的机械特性决定的,一般为 5ms 到 10ms。按键稳定闭合时间的长短则由操作人员的按键动作决定的,一般为零点几秒至数秒。按键抖动会引起按键被误读多次。为了确保 CPU 对按键的一次闭合仅作一次处理,必须进行消抖。
按键消抖有两种方式,一种是硬件消抖,另一种是软件消抖。为了使电路更加简单,通常采用软件消抖。我们开发板也是采用软件消抖,一般来说一个简单的按键消抖就是先读取按键的状态,如果得到按键按下之后,延时 10ms,再次读取按键的状态,如果按键还是按下状态,那么说明按键已经按下。其中延时10ms 就是软件消抖处理,至于硬件消抖,大家可以百度了解下,网上都有非常详细的介绍。
硬件设计
我们STM32F1开发板上有4 个控制按键,其硬件电路如图所示。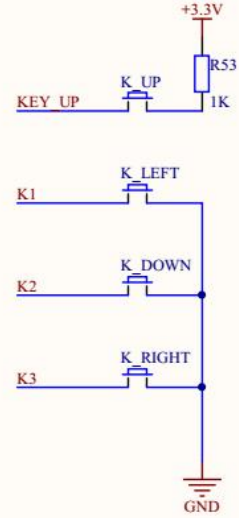

从原理图我们可以知道,按键 K_UP 连接在 STM32F1 芯片的 PA0 引脚上,按键 K_LEFT、K_DOWN、K_RIGHT 分别连接在 STM32F1 芯片的 PE2、PE3、PE4 引脚上。
需要注意的是:K_UP 按键另一端是接在 3.3V 上,按下时输入到芯片管脚即为高电平;K_LEFT、K_DOWN、K_RIGHT 按键另一端是全部接在 GND 上,这个和我们学习 51 单片机是一样的,采用独立式按键接法,按下时输入到芯片管脚即为低电平。为什么在 K_UP 上接一个 3.3V,主要是为后面章节实验使用,到时候我们再具体介绍。
软件设计
整个程序实现的流程步骤如下:
(1)初始化按键使用的端口及时钟
(2)按键检测处理
(3)按键控制处理
按键初始化函数
我们打开工程中 key.c 文件,按键初始化代码如下:
- /****************************************************************
- * 函 数 名 : KEY_Init
- * 函数功能 : 按键初始化
- * 输 入 : 无
- * 输 出 : 无
- ****************************************************************/
- void KEY_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);
- GPIO_InitStructure.GPIO_Pin=KEY_UP_Pin; //选择你要设置的IO 口
- GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD;//下拉输入
- GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
- GPIO_Init(KEY_UP_Port,&GPIO_InitStructure); /* 初始化GPIO */
- GPIO_InitStructure.GPIO_Pin=KEY_DOWN_Pin|KEY_LEFT_Pin|KEY_RIGHT_Pin;
- GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉输入
- GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
- GPIO_Init(KEY_Port,&GPIO_InitStructure);
- }
KEY_Init()函数用来初始化按键的端口及时钟。要知道按键是否按下,就需
要读取按键所对应的 IO 口电平状态,因此我们需要把 GPIO 配置为输入模式(不清楚输入模式对应的选项值,可以参考“使用库函数点亮 LED”内容,里面介绍了怎么快速查找代码),因为 K_UP 按键一端是接 3.3V 的,当按下后 PA0管脚即为高电平,所以需要将 PA0 管脚配置为下拉输入模式 GPIO_Mode_IPD,这样 PA0 管脚的默认电平就为低电平,如果读取到 PA0 管脚的电平为高电平时,就说明 K_UP 按键按下。其他几个按键是共地,所以需要配置为上拉输入模式GPIO_Mode_IPU,分析方法和 K_UP 类似。
在函数内我们看到有几个参数不是库函数内的,比如KEY_LEFT_Pin、KEY_Port,这种情况一般是我们自己定义的宏,通常放在对应的头文件内,我们打开 key.h,可以看到如下代码:
- #ifndef _key_H
- #define _key_H
- #include "system.h"
- #define KEY_LEFT_Pin GPIO_Pin_2 //定义 K_LEFT 管脚
- #define KEY_DOWN_Pin GPIO_Pin_3 //定义 K_DOWN 管脚
- #define KEY_RIGHT_Pin GPIO_Pin_4 //定义 K_RIGHT 管脚
- #define KEY_UP_Pin GPIO_Pin_0 //定义 KEY_UP 管脚
- #define KEY_Port (GPIOE) //定义端口
- #define KEY_UP_Port (GPIOA) //定义端口
- //使用位操作定义
- #define K_UP PAin(0)
- #define K_DOWN PEin(3)
- #define K_LEFT PEin(4)
- #define K_RIGHT PEin(2)
- //使用读取管脚状态库函数定义
- //#define K_UP GPIO_ReadInputDataBit(KEY_UP_Port,KEY_UP_Pin)
- //#define K_DOWN GPIO_ReadInputDataBit(KEY_Port,KEY_DOWN_Pin)
- //#define K_LEFT GPIO_ReadInputDataBit(KEY_Port,KEY_LEFT_Pin)
- //#define K_RIGHT GPIO_ReadInputDataBit(KEY_Port,KEY_RIGHT_Pin)
- //定义各个按键值
- #define KEY_UP 1
- #define KEY_DOWN 2
- #define KEY_LEFT 3
- #define KEY_RIGHT 4
- void KEY_Init(void);
- u8 KEY_Scan(u8 mode);
- #endif
key.h 文件内定义了按键的端口、管脚、读取管脚的电平状态、函数声明等信息。里面使用了两种方式定义读取管脚电平宏,一种是通过位操作,另一种是通过读取管脚电平的库函数。由于位操作比较方便,因此我们就使用位操作的方式,库函数定义的宏全部注释掉。
按键检测函数
要知道哪个按键被按下,就需要编写按键检测函数,具体代码如下:
- /***************************************************************
- * 函 数 名 : KEY_Scan
- * 函数功能 : 按键扫描检测
- * 输 入 : mode=0:单次按下按键
- mode=1:连续按下按键
- * 输 出 : 0:未有按键按下
- KEY_UP:K_UP 键按下
- KEY_DOWN:K_DOWN 键按下
- KEY_LEFT:K_LEFT 键按下
- KEY_RIGHT:K_RIGHT 键按下
- ****************************************************************/
- u8 KEY_Scan(u8 mode)
- {
- static u8 key=1;
- if(key==1&&(K_UP==1||K_DOWN==0||K_LEFT==0||K_RIGHT==0)) //任意一个按键按下
- {
- delay_ms(10); //消抖
- key=0;
- if(K_UP==1)
- {
- return KEY_UP;
- }
- else if(K_DOWN==0)
- {
- return KEY_DOWN;
- }
- else if(K_LEFT==0)
- {
- return KEY_LEFT;
- }
- else
- {
- return KEY_RIGHT;
- }
- }
- else if(K_UP==0&&K_DOWN==1&&K_LEFT==1&&K_RIGHT==1) //无按键按下
- {
- key=1;
- }
- if(mode==1) //连续按键按下
- {
- key=1;
- }
- return 0;
- }
KEY_Scan 函数带一个形参 mode,该参数用来设定是否连续扫描按键,如果mode 为 0,只能操作一次按键,只有当按键松开后才能触发下次的扫描,这样做的好处是可以防止按下一次出现多次触发的情况。如果 mode 为 1,函数是支持连续扫描的,即使按键未松开,在函数内部有 if(mode==1)这条判断语句,因此key 始终是等于 1 的,所以可以连续扫描按键,当按下某个按键,会一直返回这个按键的键值,这样做的好处是可以很方便实现连按操作。函数内的 delay_ms(10)即为软件消抖处理,通常延时 10ms 即可。
KEY_Scan 函数还带有一个返回值,如果未有按键按下,返回值即为 0,否则返回值即为对应按键的键值,如 KEY_UP、KEY_DOWN、KEY_LEFT、KEY_RIGHT,这都是头文件内定义好的宏,方便大家记忆和使用。函数内定义了一个 static 变量,所以该函数不是一个可重入函数。还有一点要注意的就是该函数按键的扫描是有优先级的,因为函数内用了 if...else if...else 格式,所以最先扫描处理的按键是 K_UP,其次是 K_DOWN,然后是 K_LEFT,最后是 K_RIGHT。如果需要将其优先级设置一样,那么可以全部用 if 语句。
主函数
最后我们看下主函数,代码如下:
- /***************************************************************
- * 函 数 名 : main
- * 函数功能 : 主函数
- * 输 入 : 无
- * 输 出 : 无
- ****************************************************************/
- int main()
- {
- u8 key,i;
- SysTick_Init(72);
- LED_Init();
- KEY_Init();
- while(1)
- {
- key=KEY_Scan(0); //扫描按键
- switch(key)
- {
- case KEY_UP: led2=0;break; //按下 K_UP 按键 点亮D2 指示灯
- case KEY_DOWN: led2=1;break; //按下 K_DOWN 按键 熄灭D2 指示灯
- case KEY_LEFT: led3=1;break; //按下 K_LEFT 按键 点亮D3 指示灯
- case KEY_RIGHT: led3=0;break; //按下 K_RIGHT 按键 熄灭D3 指示灯
- }
- i++;
- if(i%20==0)
- {
- led1=!led1; //LED1 状态取反
- }
- delay_ms(10);
- }
- }
主函数实现的功能比较简单,首先将使用到的硬件初始化(这里说的初始化表示端口和时钟全部初始化,后面就不再强调),比如 LED、蜂鸣器和按键。然后在 while 循环内调用按键扫描函数,扫描函数传入的参数值为 0,即 mode=0,所以这里只对它单次按键操作,将扫描函数返回后的值保存在变量 key 内,通过switch 语句进行比较,从而控制 LED。
程序后面的 if(i%20==0)判断语句, 表示当 i 能够整除 20 的时候就进入 LED状态翻转,后面有一个 delay_ms(10)延时;也就是间隔 200ms,led1 就会翻转一次状态。将工程程序编译后下载到开发板内,可以看到 D1 指示灯不断闪烁。当按下 K_UP 键,D2 指示灯点亮;当按下 K_DOWN 键,D2 指示灯熄灭;当按下 K_LEFT 键,D3 指示灯熄灭,当按下 K_RIGHT 键,D3 指示灯点亮。
 |
|
 |小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )
|小黑屋|
飞凌嵌入式
( 冀ICP备12004394号-1 )

 发表于 2019-9-27 16:12:18
发表于 2019-9-27 16:12:18
 千斤顶
千斤顶